










 Peter Holmes
Peter Holmes 0
0  1952
1952 75
75
Daljinski upravljani automobili zabavni su, svakako, ali samovozne robotski automobili su još zabavniji. U ovom ćemo tutorialu izraditi robota na četiri kotača koji može voziti naokolo i izbjegavati prepreke. Kupio sam ovaj kompletni 4WD komplet od AliExpressa, ali većinu ovih komponenti lako možete kupiti iz trgovine elektronike i sastaviti ga sami.
Preporučujem vam da pročitate sve upute prije nego što započnete, jer će to otkriti neke stvari koje bi mogle biti zbunjujuće prvi put. Također, ovo može izgledati kao vrlo dug, napredan projekt zbog duljine uputa, ali zapravo je prilično jednostavan. Ne trebate se zastrašivati - ovo je projekt za početnike na kojem možete dobiti neke zadovoljavajuće rezultate, a zatim nadograditi dok više učite. Ne sviđa vam se ovaj stil robota? Evo još nekoliko Arduino robota 8 Arduino robota koje možete graditi za manje od 125 dolara 8 Arduino robota možete graditi za manje od 125 dolara Arduino može učiniti puno, ali jeste li znali da može stvoriti punopravne robote? Za prilično jeftino, previše! mogli biste umjesto toga lako graditi.
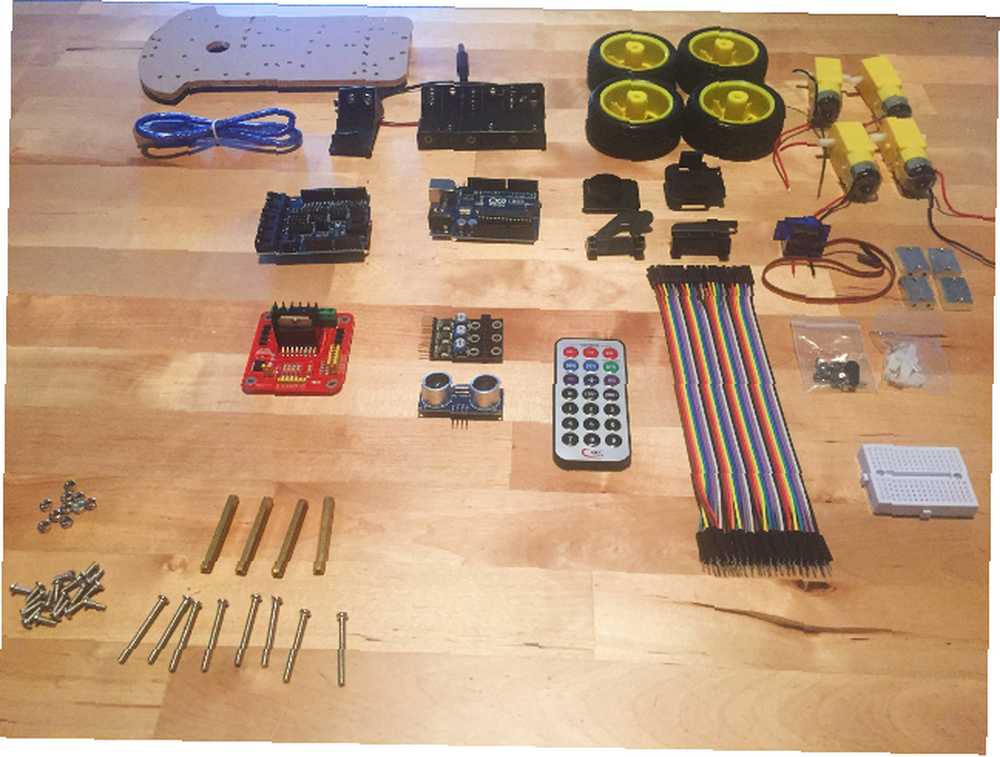
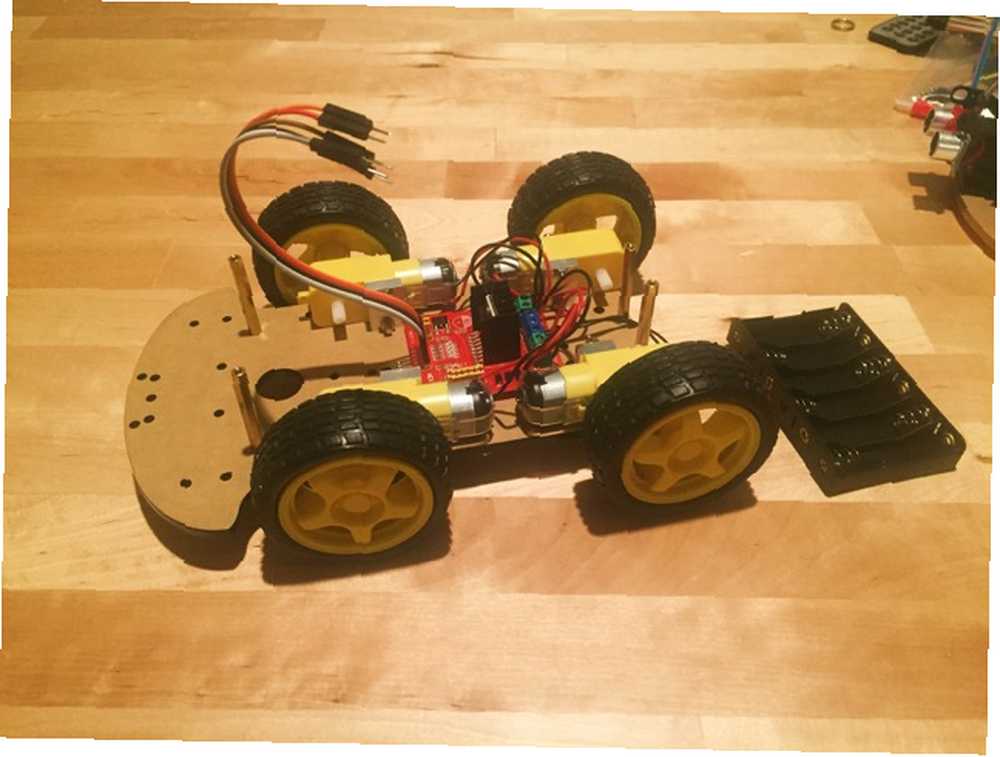
Evo što imamo nakon vađenja svega iz ambalaže:
Za početak ćemo priključiti motore i H most (karticu koja motorima daje snagu) na donji dio šasije. Prvo pričvrstite četiri metalna nosača (oni su pravokutni, izbušeni metalni blokovi) na svaki motor pomoću dva dugačka vijka i dvije matice.
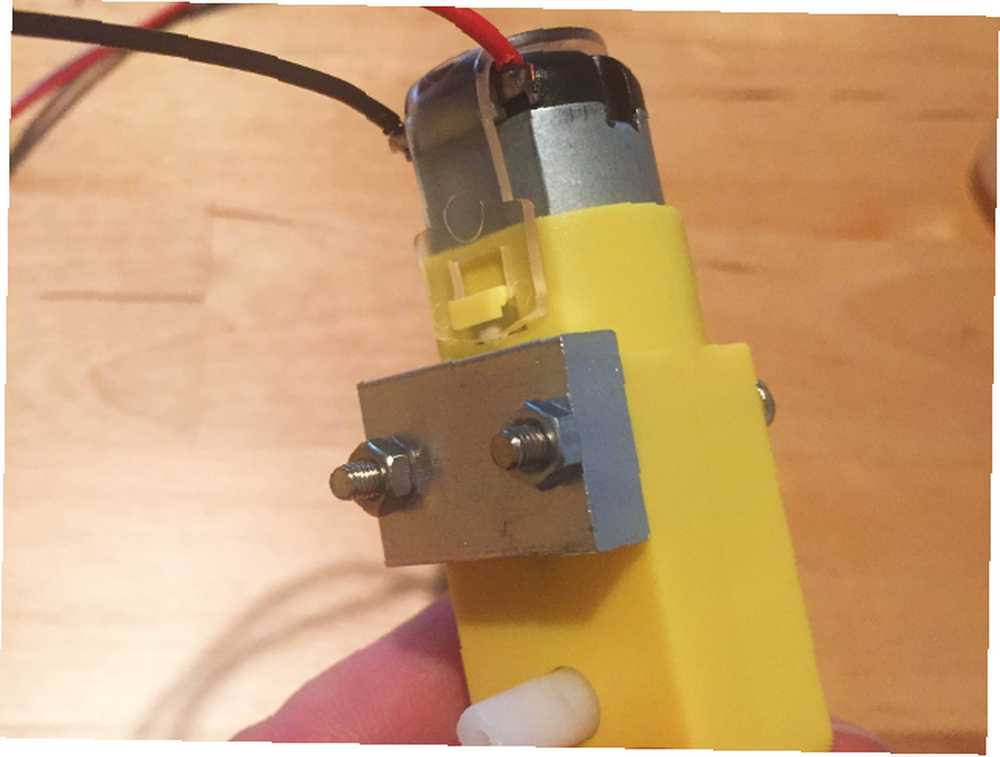
Morate biti sigurni da su pravilno pričvršćeni, pa pogledajte sliku ispod kako biste bili sigurni da će strana bloka s dvije izbušene rupe biti okrenuta prema dolje. Imajte na umu da su žice svakog motora usmjerene prema sredini kućišta.
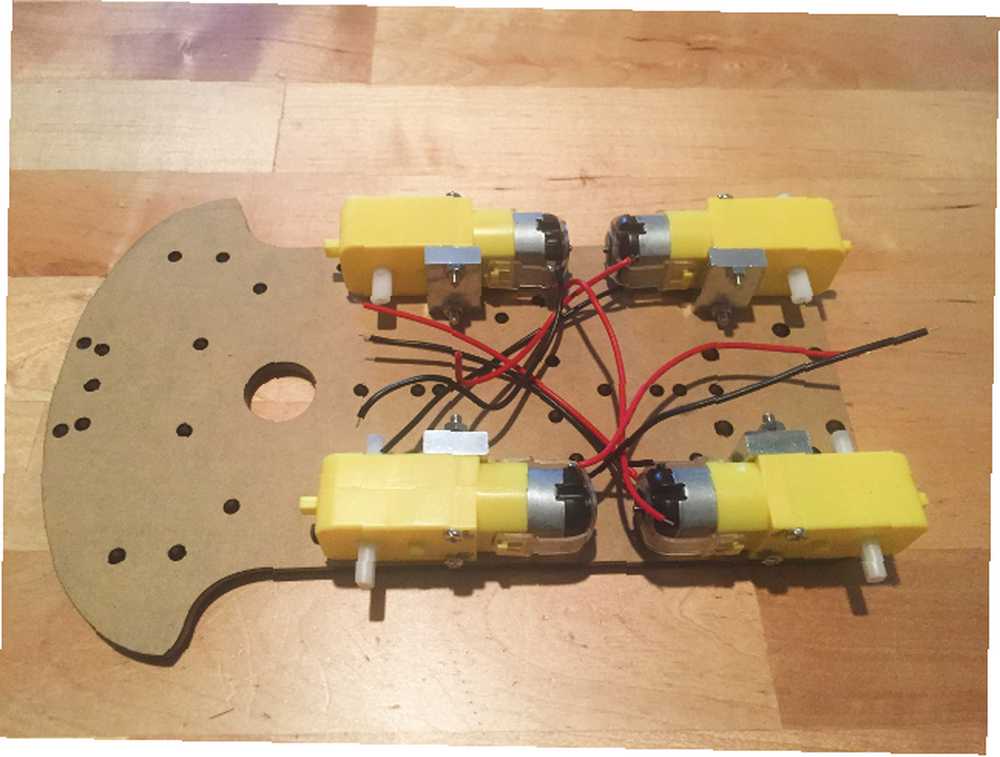
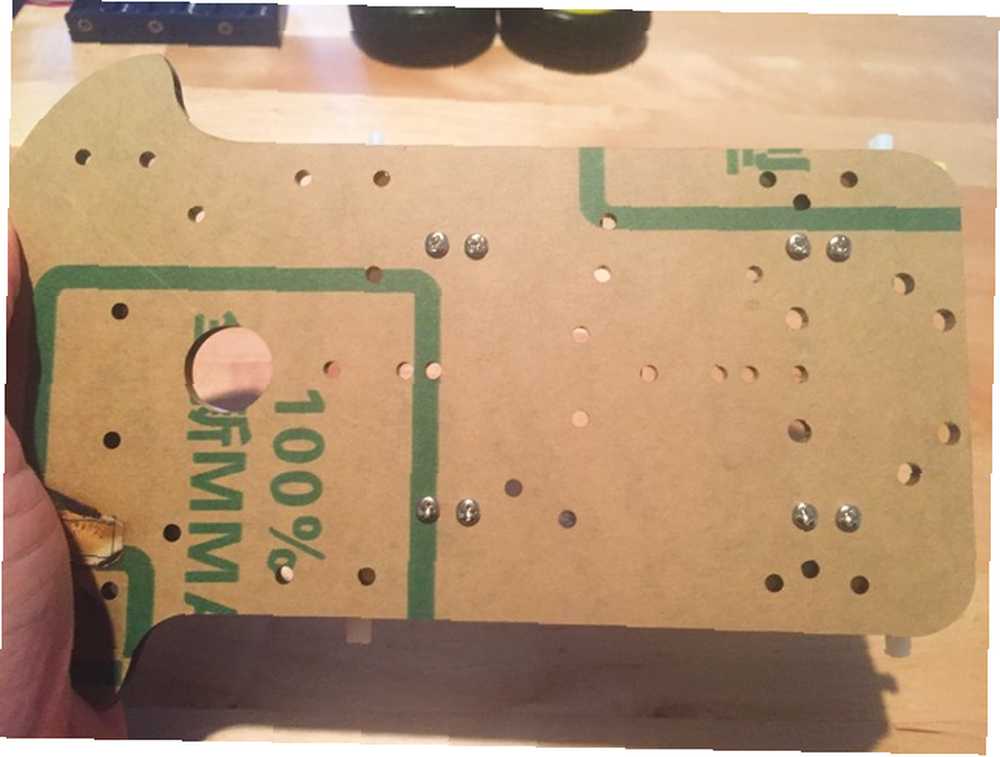
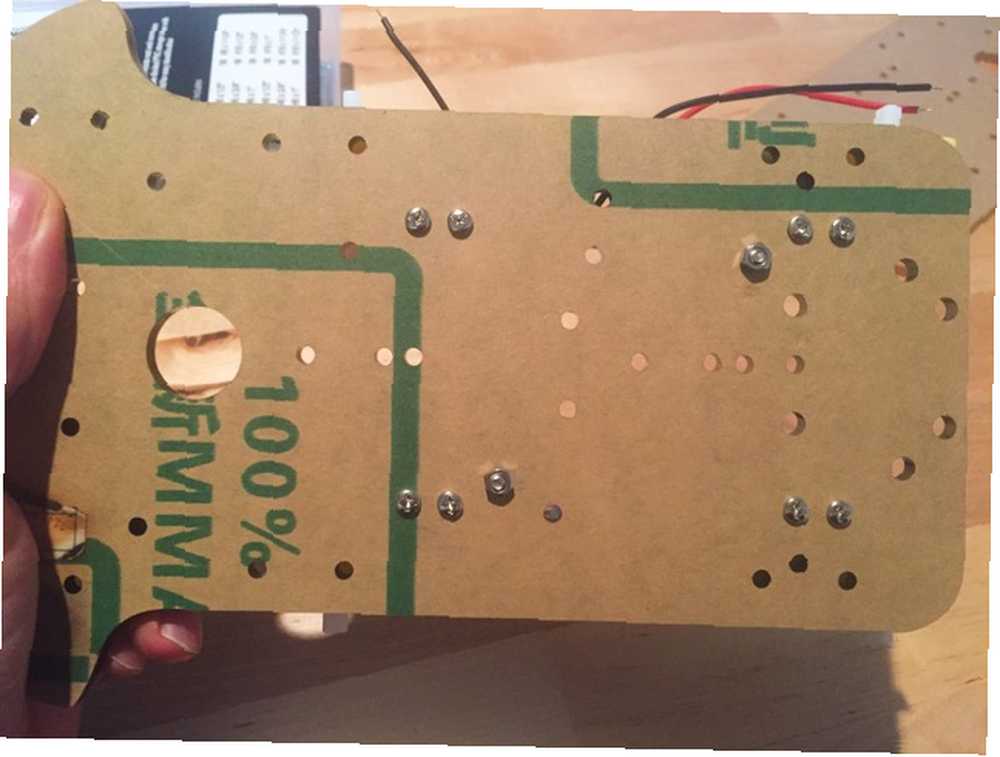
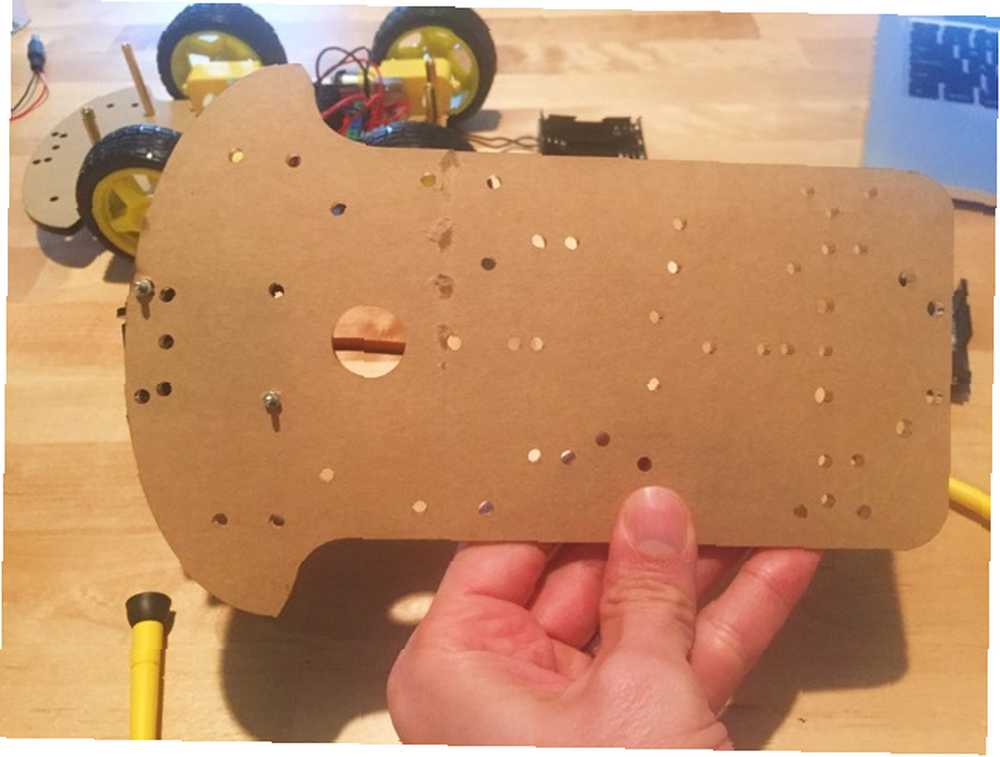
Sada se svaki motor može pričvrstiti na kućište pomoću dva kratka vijka na dnu svakog metalnog nosača. Evo prikaza dna šasije, tako da možete vidjeti gdje vijci trebaju biti:
Sljedeći korak je pričvrstiti H most (to je crvena ploča, u mom kompletu) na kućište. Možda želite pričekati dok se sve žice ne pričvrste na most H prije nego što to učinite, ali to je na vama (našao sam da je to lakše). Brza napomena: u mom kompletu je nedostajalo više učvršćivača, pa sam za osiguranje mosta koristio električnu vrpcu. Međutim, ovdje možete vidjeti kuda bi vijci i matice otišli:
Sad kad je priključen H most, možete započeti s priključivanjem napajanja. Budući da nosač baterije sa šest AA dolazi sa istosmjernim adapterom, morat ćete ili odrezati kraj (što sam i učinio) ili pokrenuti premosne žice do samih baterija.

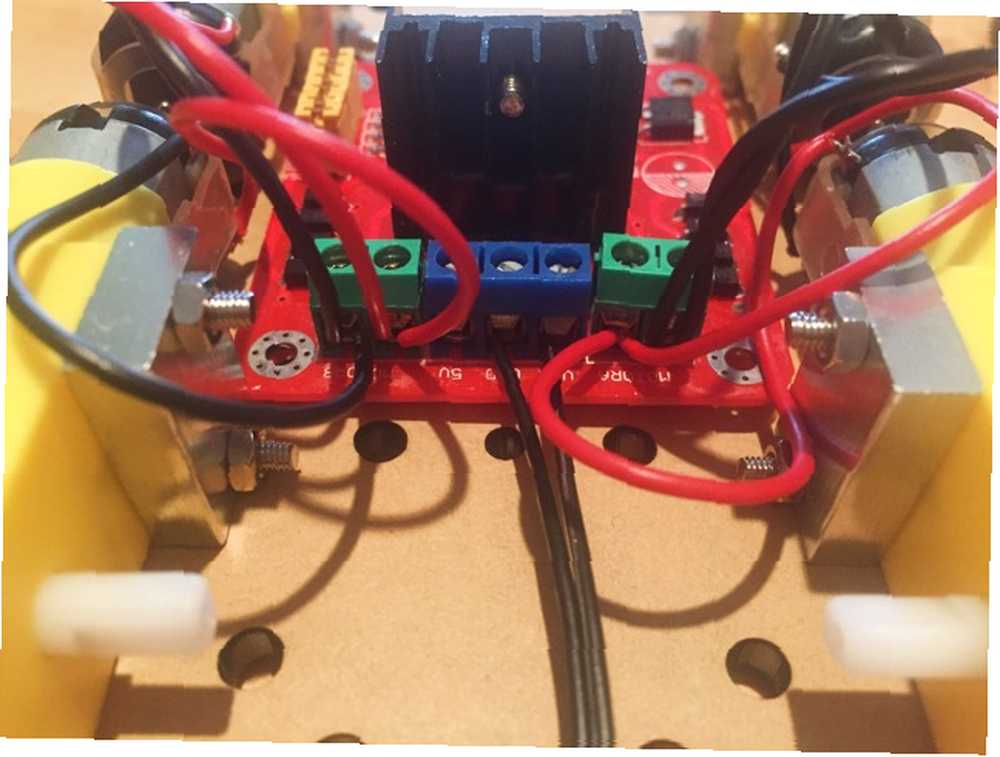
Bez obzira na to kako se odlučite za to, pokrenut ćete pozitivnu žicu do priključka s oznakom “VMS” a negativna žica na označenu “GND” na mostu. Pričvrstite pričvršćivače i provjerite jesu li osigurani. Zatim ćete spojiti žice motora. S obje strane je skup od dva ulaza; jedan je označen “MOTORA” i drugi “MOTORB.” Oba crvene žice sa svake strane ući će u središnji zeleni priključak, a obje crne žice ići će u najudaljeniji kraj. Na ovoj slici bi trebalo biti jasnije:
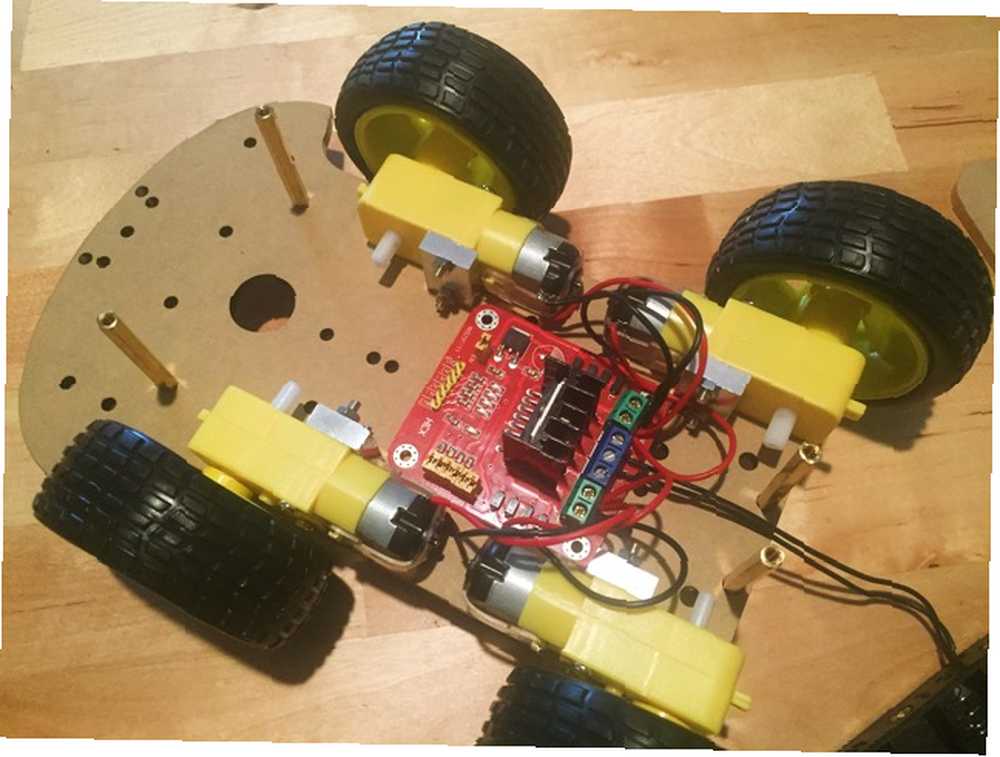
Otkrio sam da moram ukloniti dio kućišta s žica motora da bih ovo uspio. Sad kad su motori i napajanje ožičeni, gurnite kotače na osovine pogona motora i pričvrstite četiri bakrena vratila na mjestima koja su prikazana na slici ispod (za svako bakreno vratilo treba jedan mali vijak). Ovaj robot počinje dobivati oblik!
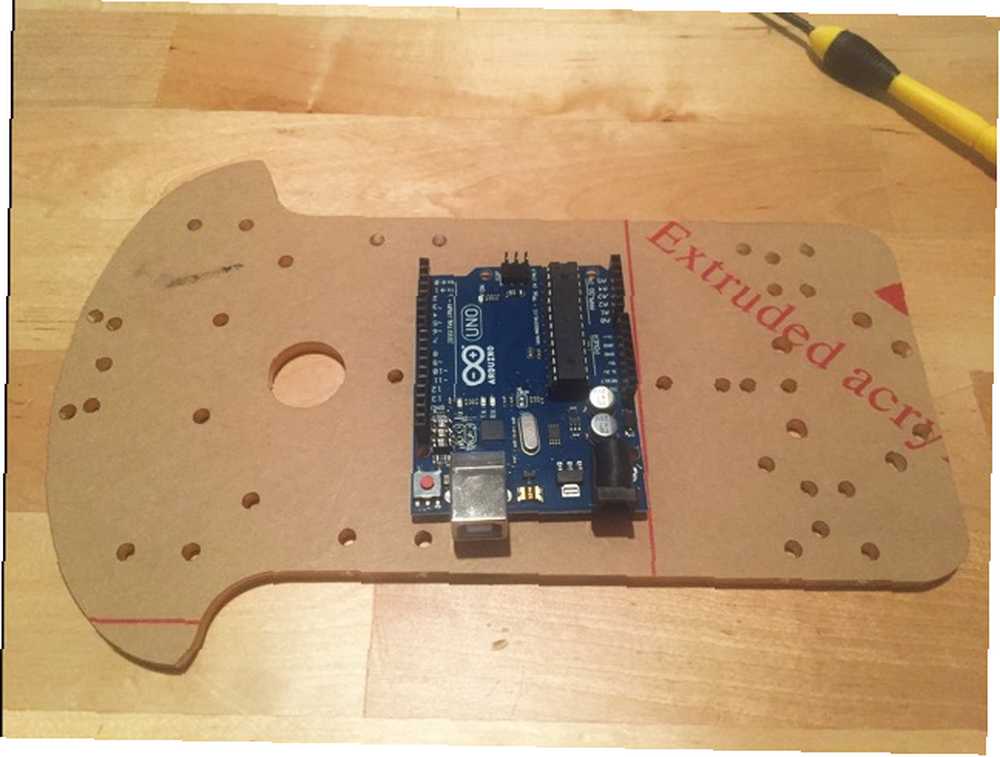
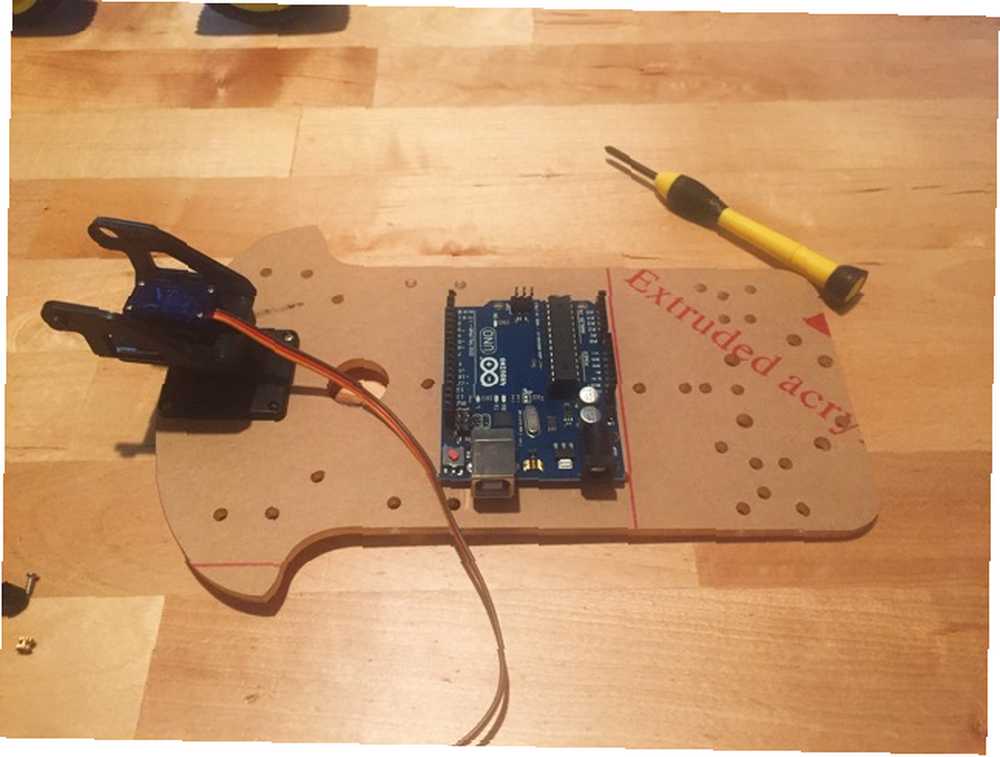
Sada, odložite onaj dio šasije u stranu i zgrabite onaj drugi koji će sjediti na vrhu. Sljedeći je korak pričvršćivanje Arduino-ja, morao sam upotrijebiti električnu vrpcu, ali trebali biste moći bolje osigurati svoje vijke i matice.
Sljedeći korak zahtijeva mikro servo, crni križni presjek, držač servoa (koji se sastoji od tri crna plastična komada) i nekoliko malih vijaka. Upotrijebite jedan od većih oštrih vijaka u kompletu da pričvrstite crni križni trak na mikro servo:
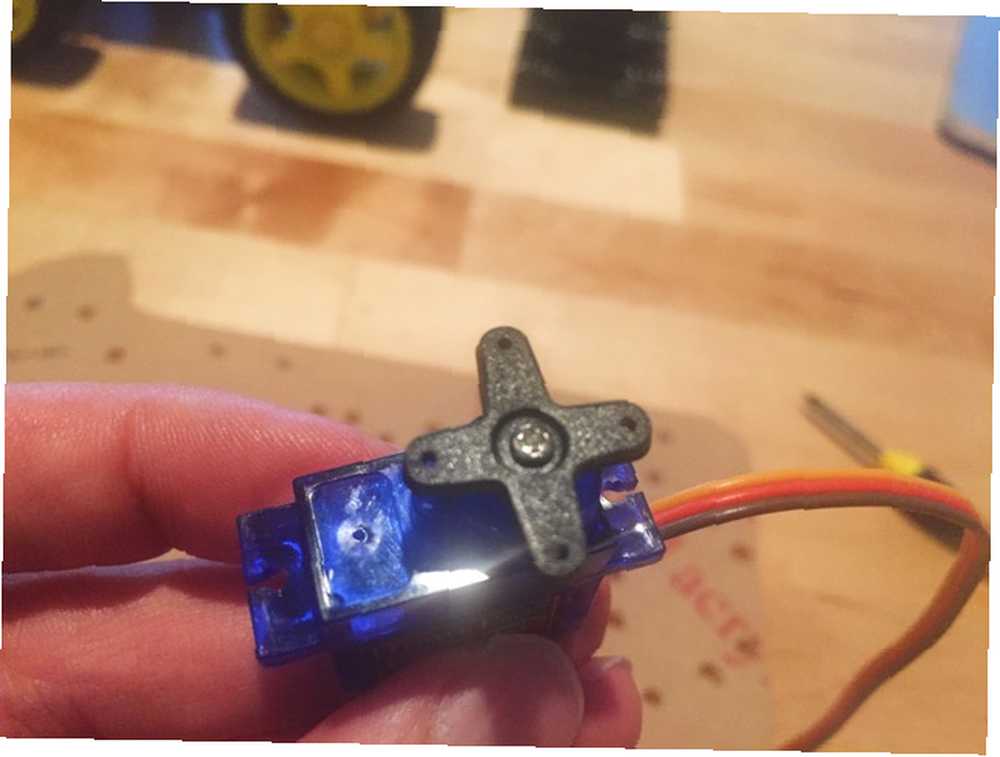
Zatim servo okrenite naopako u crni plastični prsten držača. Provjerite jesu li žice koje izlaze iz servo upravljača okrenute u istom smjeru kao i dulji dio držača (opet pogledajte sliku dolje), a pričvrstite poprečnu traku pomoću četiri sitna vijka (u držaču su četiri rupe koje poravnajte s rupama na poprečnoj traci).

Evo kako izgleda nakon privitka:
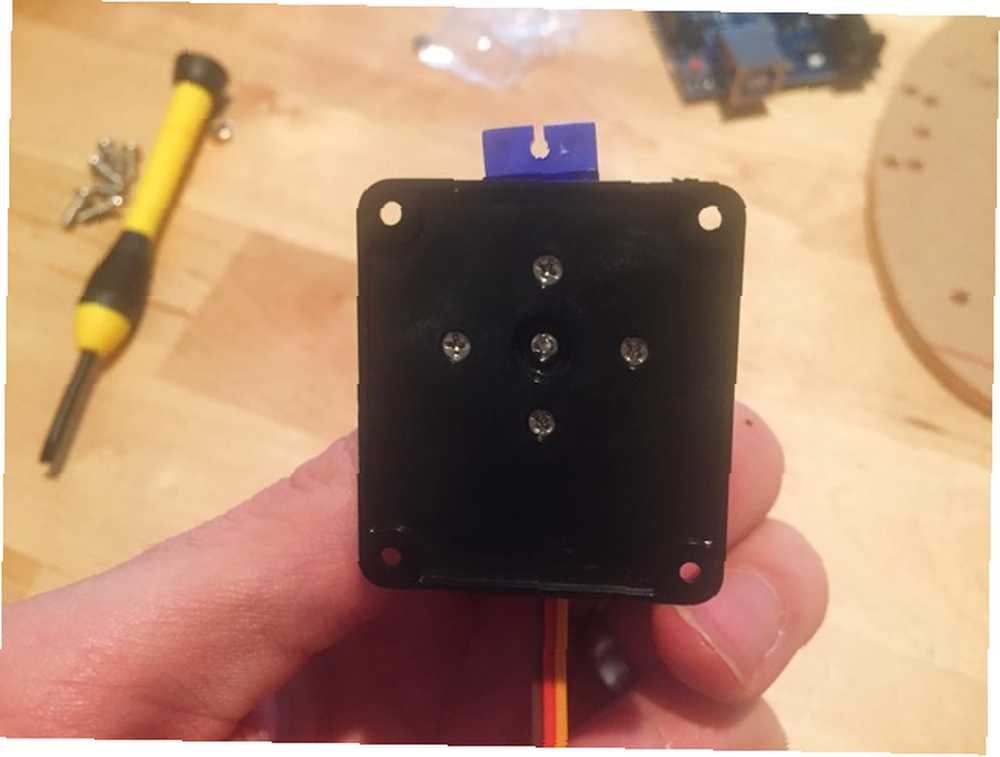
Konačno, uzmite druga dva komada servo držača i pritisnite ih na servo (postoje bočni otvori koji odgovaraju plastičnom jezičku na servu)..
Sada kada je servo držač dovršen, može se montirati na kućište.
Evo gdje vijci idu:
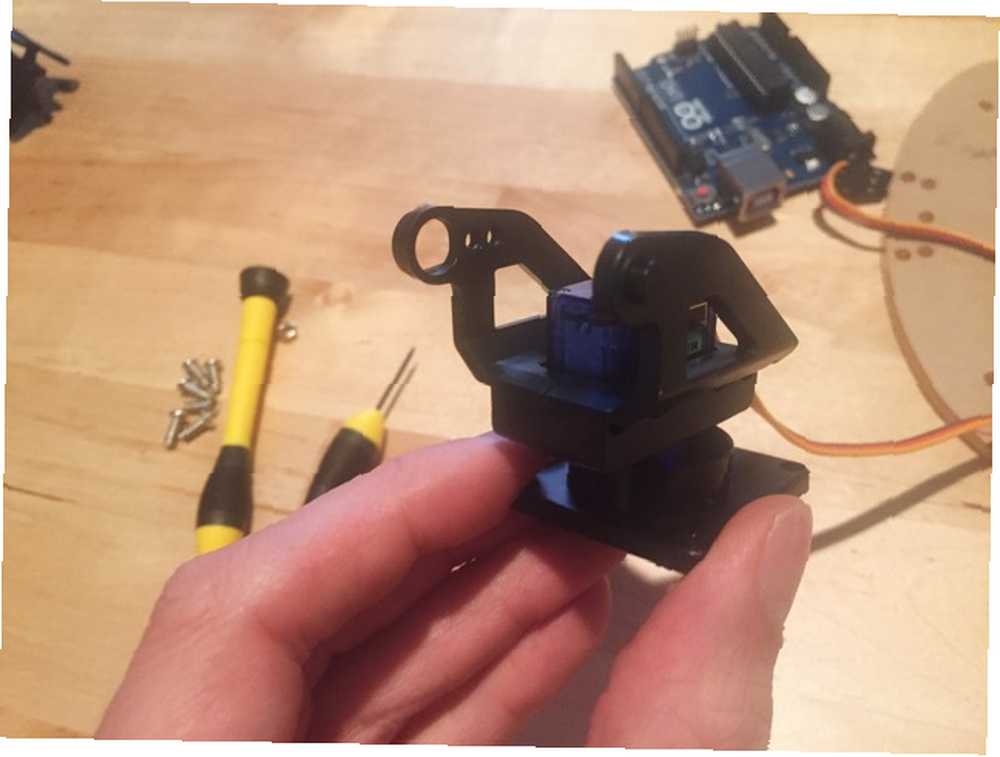
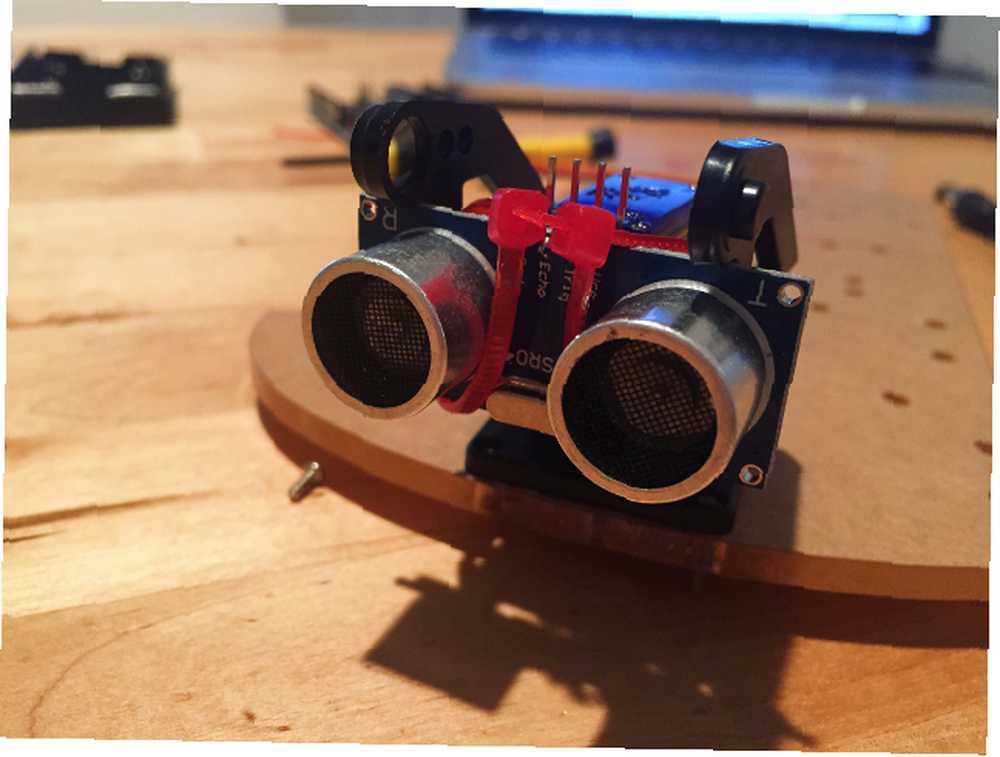
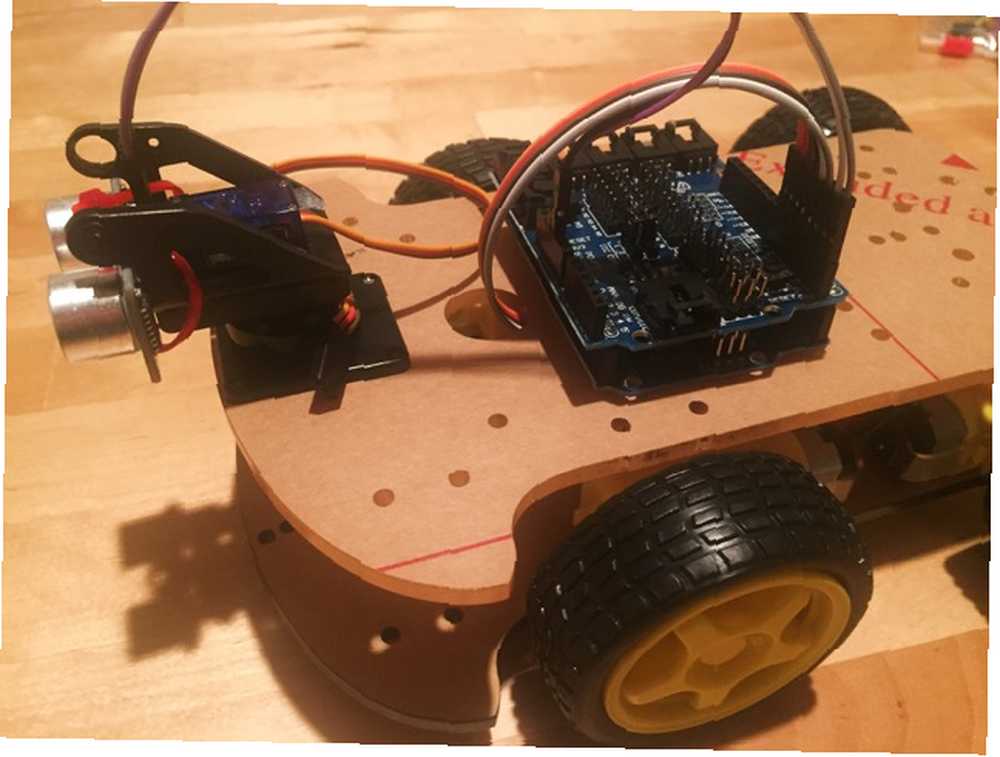
Vrijeme je da našem robotu pogledamo malo. Učvrstite ultrazvučni senzor na držač servo uređaja pomoću dvije zipke.
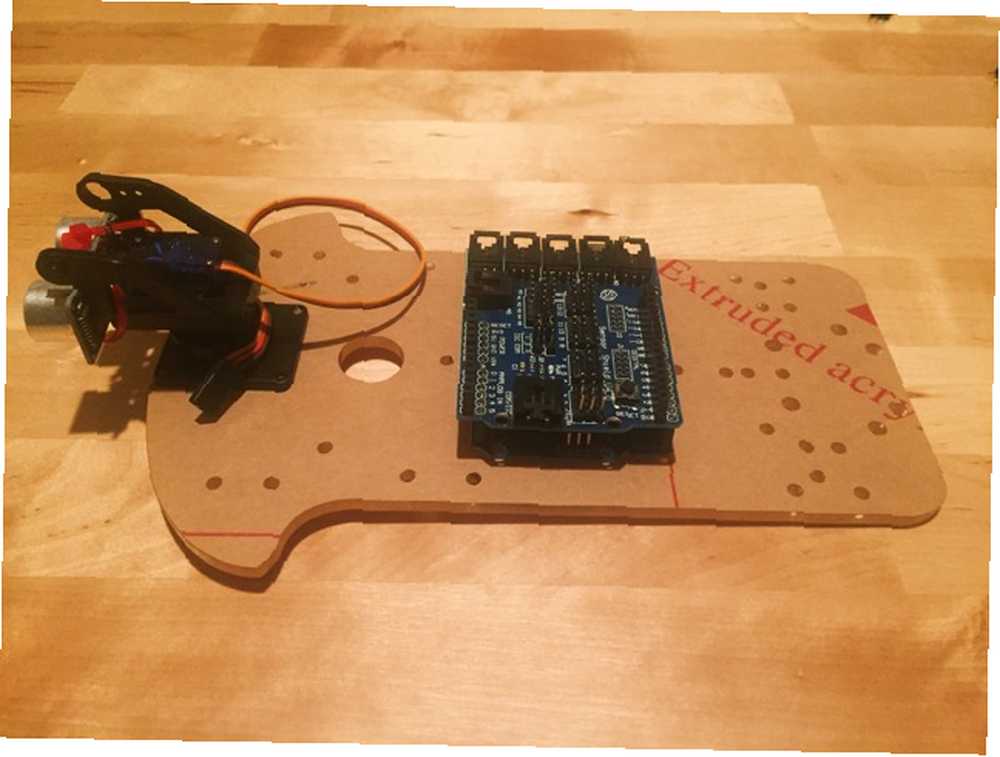
Ako radite iz istog kompleta kao i ja, dobit ćete Arduino štitnik senzora. Nećemo ga koristiti u ovom sastavljanju, ali možete ga dodati na vrh UNO-a ako želite (kao što imam na slici ispod). Samo poravnajte igle na dnu štitnika s I / O priključnicama na Arduino i pritisnite ih da ih povežete. Trenutačno vam nije potreban, ali štitovi mogu biti korisni Top 4 Arduinova oklopa kako biste nadjačali svoje projekte Top 4 Arduinova oklopa kako biste nadjačali svoje projekte Kupili ste Arduino starter set, slijedili ste sve osnovne vodiči, ali sad ste pogodili kamen spoticanja - trebate više komadića i bob-a da biste ostvarili svoj elektronički san. Srećom, ako imate ... .
Bilo da spojite senzorski štit ili ne, sada će vam trebati četiri žice za spajanje ultrazvučnog senzora na Arduino. Postoje četiri pina na senzoru, VCC, GND, TRIG i ECHO. Spojite VCC na 5V pin na Arduino, GND na GND, a TRIG i ECHO na I / O igle 12 i 13.
Sada uzmite donji dio šasije i povežite šest kratkospojnih žica na I / O pinove H mosta (označeni su ENA, IN1, IN2, IN3, IN4 i ENB). Vodite računa o tome koje su žice u boji povezane u koje luke, što ćete kasnije morati znati.
Sada je vrijeme za početak sastavljanja ove stvari. Uhvatite gornji dio kućišta i postavite ga na bakrene osovine spojene na donji dio, a kroz otvor na sredini kućišta povucite žice pričvršćene na H most. Spojite šest žica na I / O portove na sljedeći način:
- ENA do I / O priključka 11
- Ulaz u ulazno / izlazni port 10
- A1 do I / O ulaza 5
- A2 do I / O priključka 6
- B1 do I / O priključka 4
- B2 do I / O priključka 3
Sada pomoću četiri kratka vijka pričvrstite gornji dio kućišta na bakrene osovine. Postavite šestočlani nosač baterije na kućište (privijte ga, ako možete), pričvrstite držač ćelije od 9 V na Arduino i ovaj je bot spreman za ljuljanje!
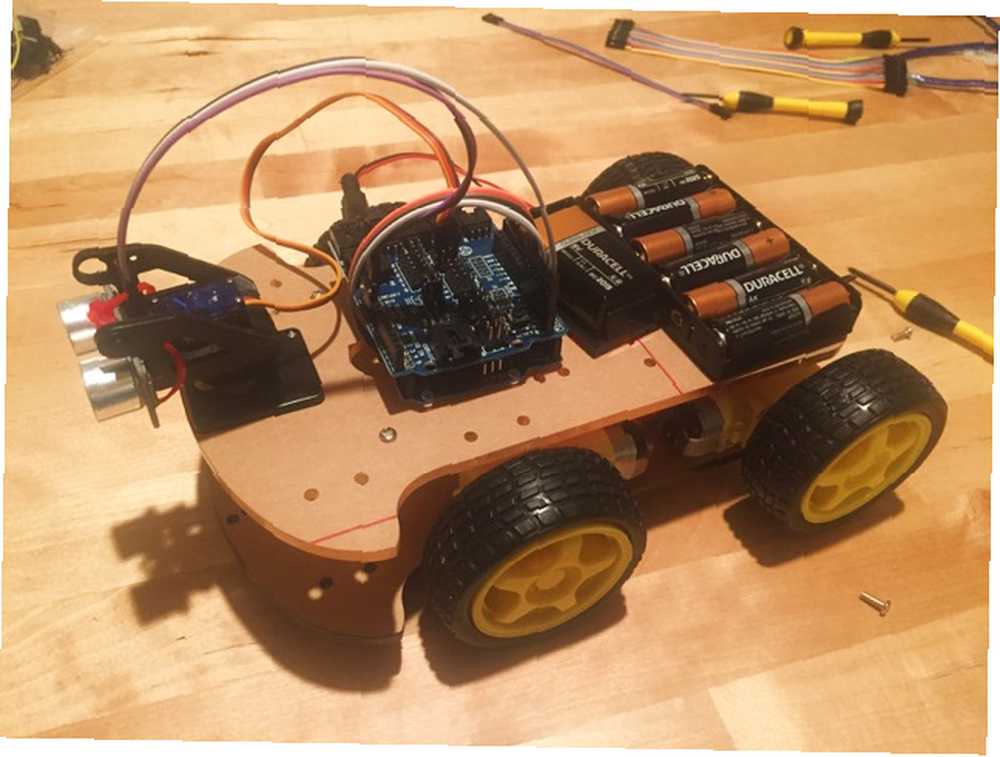
Pa, gotovo spremna za rock. Još nema sasvim dovoljno osobnosti.
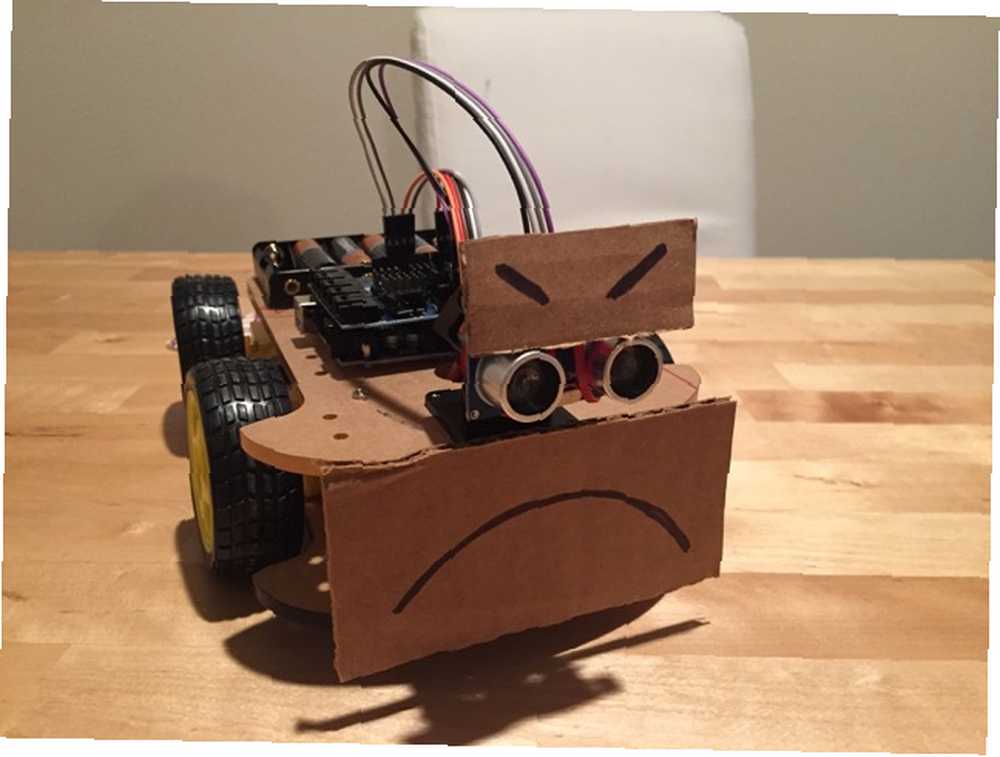
Idemo tamo. Sada da mu da mozak. Napravimo malo programiranja.
Prvo što ćemo napraviti je provjeriti da li su most i motori ispravno spojeni. Evo kratke skice koja će navesti botu da krene naprijed pola sekunde, vozi se pola sekunde unatrag, a zatim skrene lijevo i desno:
To je puno koda za jednostavan test, ali definiranjem svih tih funkcija olakšava se podešavanje kasnije. (Veliko hvala Billwaa za njegov blog post o korištenju H-mosta za definiranje ovih funkcija.) Ako nešto pođe po zlu, provjerite sve vaše veze i jesu li žice spojene na ispravne igle. Ako je sve uspjelo, vrijeme je da krenete na test senzora. Za upotrebu ultrazvučnog senzora, morat ćete preuzeti biblioteku NewPing, a zatim je upotrijebiti Skica> Uključi knjižnicu> Dodaj .ZIP knjižnicu… učitati knjižnicu.
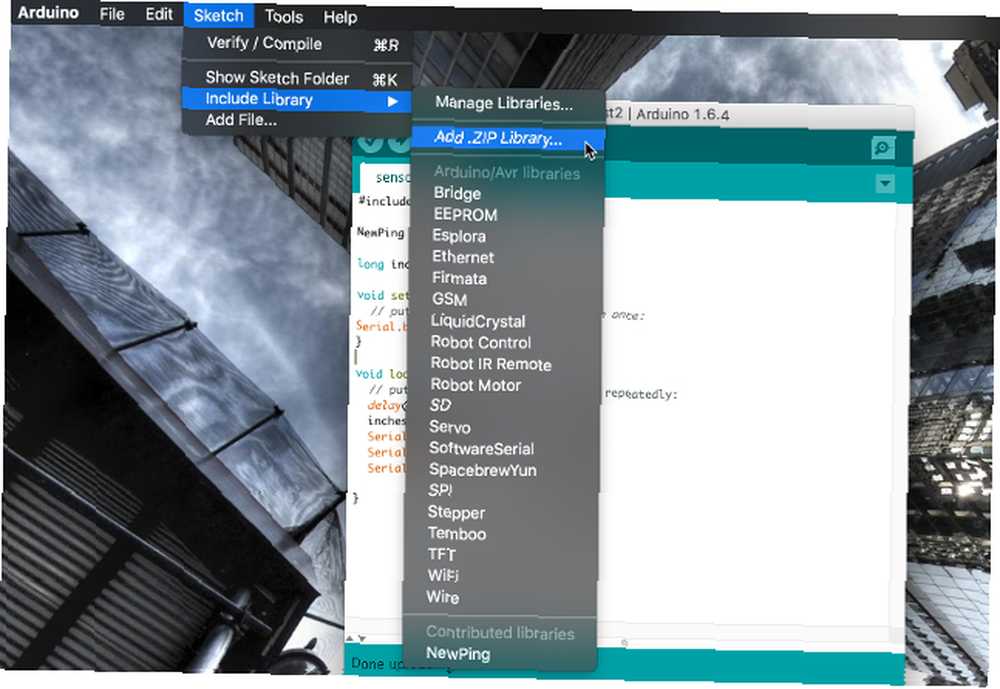
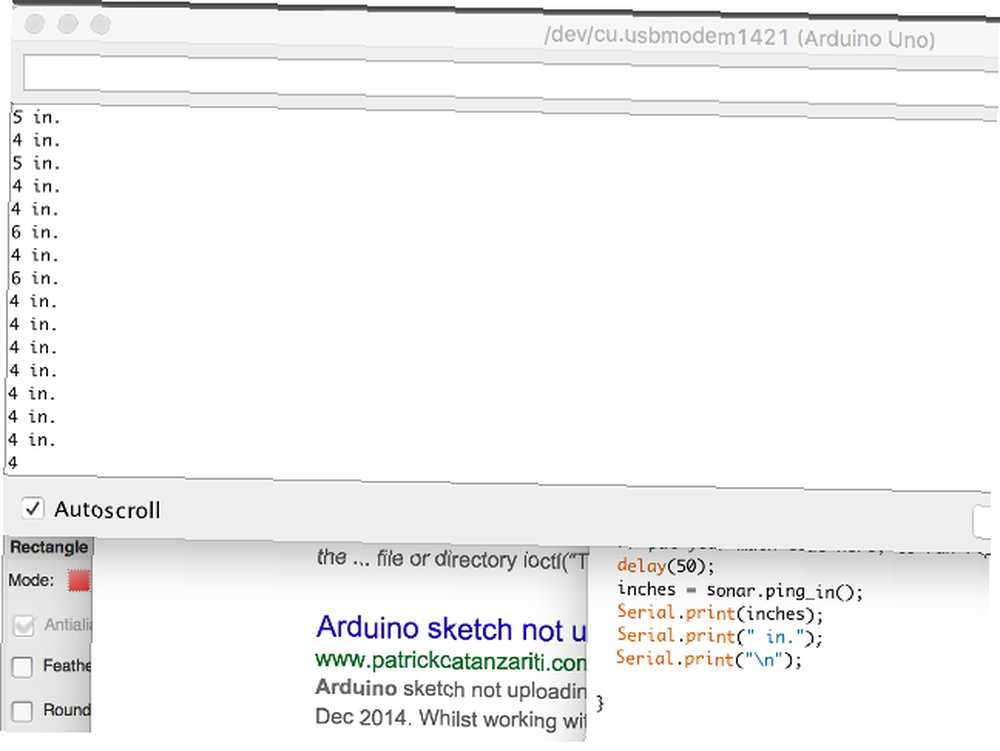
Provjerite vidite li izjavu uključuju na vrhu vaše skice; ako nemaš, pogodi Skica> Uključi knjižnicu> NewPing. Nakon što učinite to, učitajte sljedeću skicu:
Učitajte skicu i otvorite serijski monitor koristeći Alati> Serijski monitor. Trebali biste vidjeti redovno ažuriranje slijeda brojeva. Držite ruku ispred senzora i pogledajte je li se taj broj promijenio. Pomičite ruku unutra i van, i trebali biste dobiti mjerenje udaljenosti vaše ruke od senzora.
Ako je sve radilo ispravno, vrijeme je da sve to sastavite i pustite da se ova stvar pokrene! Evo koda za robota. Kao što vjerojatno možete reći, to su u osnovi dvije testne skice sastavljene s dodatkom if izjava koja kontrolira ponašanje robota. Dali smo mu vrlo jednostavno ponašanje za izbjegavanje prepreka: ako otkrije nešto manje od četiri inča, napravit će sigurnosnu kopiju, skrenuti lijevo i ponovo se kretati. Evo videozapisa o botu u akciji.
Dajte svom robotu neki život
Nakon što steknete ovo ponašanje ispravno, možete dodati složenije ponašanje; napraviti robota naizmjence između skretanja ulijevo i udesno ili odabiriti nasumično; zvuči zujanje ako mu se nešto približi; samo okreni, umjesto da podupire; zapravo si ograničena samo maštom. Mogli biste koristiti gotovo sve u svom startnom kompletu Arduino Što je u vašem Arduino Starter Kit-u? [Arduino početnici] Što je u vašem Arduino Starter Kit-u? [Arduino početnici] Suočeni s kutijom punom elektroničkih komponenti, lako je biti preopterećen. Evo vodiča o tome što ćete točno naći u svom kompletu. da biste dodali više funkcionalnosti. Također ćete primijetiti da za servo još nismo ništa kodirali: zapravo možete napraviti svoje robota “oči” kretati se naprijed-natrag. možda ih koristi za traženje staze, a ne samo za izradu sigurnosnih kopija kad god nađe prepreku izravno ispred.
Javite nam ako se odlučite sagraditi ovog ili drugog robota i recite nam kako odlučite prilagoditi njegovo ponašanje ili izgled. Ako imate bilo kakvih pitanja o ovom robotu, pošaljite ih u komentarima u nastavku, a ja ću vidjeti mogu li vam pomoći!